|
Yuantao Chen is currently a Mphil student at the The Chinese University of Hong Kong(ShenZhen), supervised by Prof. Xiaoguang Han. His research interests include 3D computer vision and robotics. Previously, he was a Research Intern at the DISCOVER Lab, Institute for AI Industry Research, Tsinghua University. He obtained his B.Sc. degree in Computer Science and Technology from Xi'an University of Architecture and Technology. Email / CV / Google Scholar / Twitter / Github |

|
|
I am interested in 3D computer vision and robotics, specifically on topics such as localization and mapping, neural scene representations, robot simulation and self-driving. |
|
|
Zirui Wu, Tianyu Liu, Liyi Luo, Zhide Zhong, Jianteng Chen, Hongmin Xiao, Chao Hou, Haozhe Lou, Yuantao Chen, Runyi Yang, Yuxin Huang, Xiaoyu Ye, Zike Yan, Yongliang Shi, Yiyi Liao, and Hao Zhao CICAI, 2023 (Oral) project page / arxiv We propose an autonomous driving simulator based upon neural radiance fields (NeRFs) |

|
Zirui Wu*, Yuantao Chen*, Runyi Yang, Zhenxin Zhu, Chao Hou, Yongliang Shi†, Hao Zhao, Zhou Guyue arxiv, 2023 arxiv / We propose the first solution for NeRF that self-calibrates the mismatch between RGB and depth frames |

|
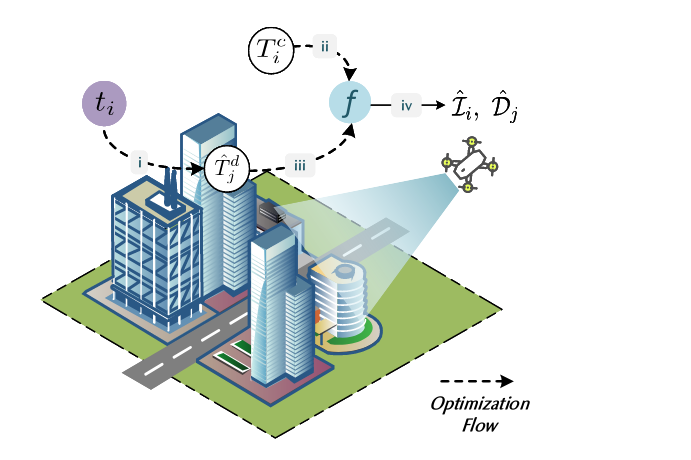
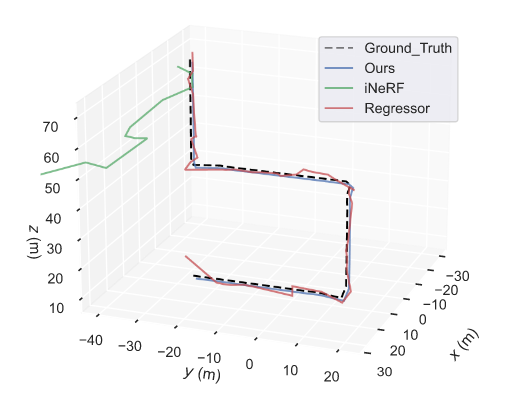
Zhenxin Zhu*, Yuantao Chen*, Zirui Wu, Chao Hou, Yongliang Shi1†, Chuxuan Li, Pengfei Li, Hao Zhao, Guyue Zhou ICRA, 2023 arxiv / ICRA We propose a two-stage localization mechanism consists of place recognition and pose optimization in city-scale NeRF |
|
template adapted from Jon Barron's awesome website
|